Інженерна психологія - Трофімов Ю. Л. - 5.3. Організація робочого місця оператора
Робоче місце - це простір, в якому розташовані засоби відображення інформації, органи управління і допоміжне обладнання для виконання трудової діяльності оператора або групи операторів. Робоче місце - найменша цілісна одиниця виробництва, де наявні три основні складові: предмет праці, засоби діяльності і суб'єкт діяльності.
Конструктивні властивості технічних засобів діяльності слід узгоджувати з можливостями людини з урахуванням виконання нею робочих операцій у нормальних чи аварійних умовах. Цього можна досягти, враховуючи:
O антропологічні, біомеханічні, психофізіологічні і психологічні властивості людини;
O санітарно-гігієнічні норми, вимоги і рекомендації;
O вимоги техніки безпеки;
O норми технічної естетики.
Специфіка робочих місць залежить від характеристик вирішуваних завдань і особливостей предметно-просторового оточення. Вона визначає:
O типи засобів управління виробничим процесом і особливості їхнього розміщення;
O типи засобів відображення інформації і органів управління, а також їх взаємне розташування;
O робоче положення тіла;
O необхідність у спецодязі і засобах індивідуального захисту;
O режим праці та відпочинку;
O забезпечення необхідного простору для ремонту і налагодження обладнання;
O необхідність місця для спецоснащення, складування готової продукції.
Робочі місця можуть бути класифіковані за різними ознаками.
З-поміж основних функцій, які виконує людина в системі, розрізняють робочі місця: оперативного управління, інформаційно-довідкові, оператора ЕОМ, функціонально-технологічного контролю, керування рухомим об'єктом, комбіновані
Щодо кількості одночасно працюючих операторів робочі місця є індивідуального і групового використання.
За характером робочих операцій, які виконує людина, вони поділяються на автоматизовані і механізовані.
За ступенем спеціалізації робочі місця можуть бути універсальними, спеціалізованими і спеціальними.
Залежно від положення тіла оператора у просторі під час трудової діяльності виділяють робочі місця для виконання робіт сидячи, стоячи, сидячи-стоячи і лежачи.
Конструкція робочого місця має забезпечувати: можливість оператора швидко зайняти його, змінити положення тулуба і кінцівок, прийняти зручну позу для відпочинку; відсутність постійного контакту життєво важливих частин тіла з корпусом, механізмами та агрегатами об'єкта, можливість надання першої допомоги пораненим, їх евакуації, швидкого залишення об'єкта в аварійних ситуаціях.
Просторове компонування робочого місця, величина зусиль на органи управління, параметри кутів спостереження визначаються насамперед положенням тіла працюючого.
З точки зору біомеханіки положення тіла залежить від орієнтації його в просторі, а також від розмірів площі опори. Кожне з положень тіла характеризується певними умовами рівноваги, ступенем напруження м'язів, станом серцево-судинної і дихальної систем, розташуванням внутрішніх органів і, відповідно, витратами енергії.
Крім того, на вибір робочого положення впливають характер робочого навантаження та його значення, обсяг і темп робочих рухів, задана точність виконання операцій, особливості предметно-просторового оточення і площа функціональних приміщень.
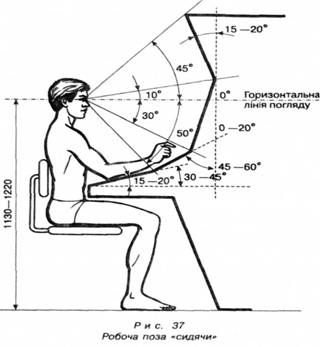
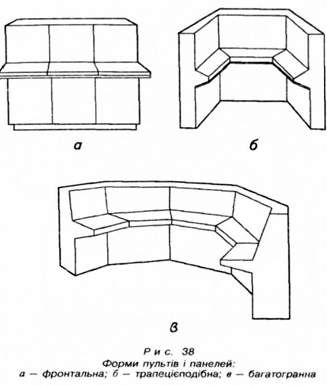
Сам термін "робоча поза" позначає типове положення тіла у просторі при виконанні трудових операцій. Як правило, перевага надається положенню оператора "сидячи", оскільки це вимагає меншого напруження різних груп м'язів і сприяє успішному перебігу процесів сприймання і переробки інформації (рис. 37). Основою такого автоматизованого робочого місця управління є пульт управління, який може мати різні форми (рис. 38).
Фронтальна форма пульта (а) застосовується за можли-
Вості розташування всіх органів управління і засобів відображення інформації у відповідних зонах:
O ОУ - максимальної і допустимої зони досяжності;
O ЗВІ - в зонах центрального і периферійного поля зору.
Трапецієподібну (б) використовують тоді, коли не можливо ЗВІ І ОУ розташувати на пульті фронтальної форми. В цих випадках вони частково розмішуються на бокових панелях, які розгорнуті відносно фронтальної під кутом 90-120*.
Багатогранну (в) застосовують за значної кількості ЗВІ і ОУ, при цьому мінімальний радіус досяжності становить 600 мм, а максимальний радіус спостереження за показниками приладів - 5000 мм.
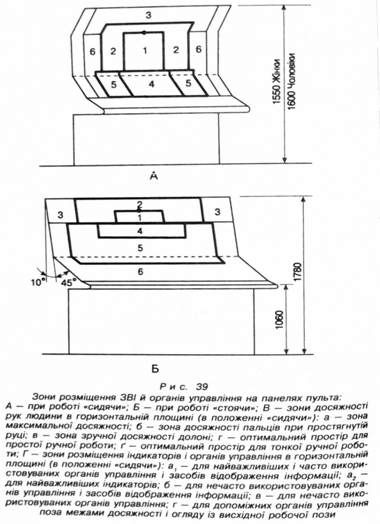
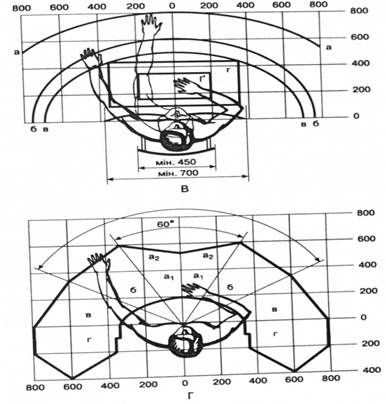
Головною проблемою при проектуванні пультів управління є розташування ЗВІ і ОУ. На рис. 39 наведені необхідні зони для їхнього розміщення у положенні "сидячи" і "стоячи".
Підвищення точності і швидкості дій операторів передбачає розташування ЗВІ і ОУ з дотриманням принципів (рис. 40) функціональної відповідності, об'єднання, поєднання стимулу і реакції, послідовності дій, важливості і частоти використання.
Принцип функціональної відповідності (рис. 40, а) є актуальним, коли підсистеми СЛМ незалежні, автономні або дуже слабо пов'язані між собою. Згідно з цим принципом кожна підсистема СЛМ має свою блок-панель на пульті уп-
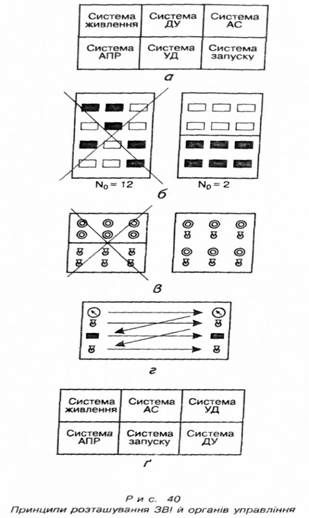
Равління. Загальна оптимізація компонування пульта залежатиме від оптимізації кожної блок-панелі, для компонування якої можна послуговуватися іншими принципами розташування ЗВІ і ОУ.
Принцип об'єднання (рис. 40, б) вимагає застосування значної кількості однотипних елементів контролю і управління, які набувають одного й того самого стану (положення) протягом певного часу і які поєднані в одну групу. Використання цього принципу сприяє значному зменшенню кількості інформації, що надходить до людини-оператора.
Принцип поєднання стимулу і реакції (рис. 40, в) просторово узагальнює елементи управління та індикації. Застосування цього принципу суттєво зменшує кількість варіантів вибору органу управління і відповідно - інформаційне навантаження на оператора.
Принцип послідовності дій (рис. 40, г) вимагає такого розташування елементів управління на пульті, яке б відповідало алгоритму діяльності оператора. При цьому необхідно враховувати стереотипи, які склалися в певного контингенту операторів (наприклад, для слов'янських народів - це стереотип читання текстів зліва направо, а для арабів чи японців - навпаки).
Принцип важливості і частоти використання (рис. 40, г) передбачає розміщення найважливіших індикаторів та органів управління, що найчастіше використовуються, в оптимальних робочих зонах. Цим забезпечується ефективна робота оператора за рахунок зниження його втомлюваності.
Розглянуті принципи розташування ЗВІ і ОУ можуть вступати у протиріччя між собою, тому в кожному конкретному випадку проектування пульта управління потрібно насамперед звертати увагу на особливості функціонування СЛМ.
Робоче сидіння є елементом робочого місця, яке забезпечує підтримку робочої пози оператора у положенні "сидячи".
Обираючи тип робочого сидіння, варто враховувати специфіку роботи, обсяг робочого простору, особливості інших елементів робочого місця, можливість зміни робочого положення, характер рухів різних частин тіла, наявність вібрації, умови безпеки.
Робочі сидіння повинні забезпечувати: o підтримку такого положення тіла у просторі, за якого навантаження на м'язи буде мінімальним;
O умови для зміни робочої пози з метою зняття статичної напруги м'язів спини;
O нормальне функціонування організму людини;
O зручність розміщення у кріслі і вставання з нього;
O вільне переміщення тулуба і кінцівок тіла у процесі роботи;
O повільне або ступеневе регулювання параметрів, з кроком для лінійних параметрів - 10 мм, а для кутових - Г.
Робочі стільці та крісла розраховані на довготривале використання, і тому до їхньої конструкції належать сидіння, спинка, підтримувальні конструкції, підлокітник і підголівник (для крісел), підставка для ніг.
Робочі крісла для транспортних засобів мають: високу спинку для забезпечення необхідної опори тіла в роботі з педалями; значний кут її нахилу (95е... 135°) з обов'язковим його регулюванням; ширше сидіння (450...800 мм); регулювання висоти сидіння, передньо-заднього його переміщення, антивібраційне обладнання. Основні параметри крісла оператора наведені на рис. 41.
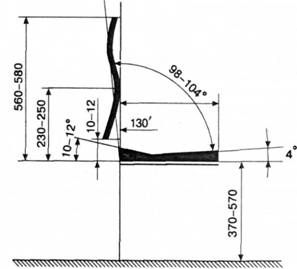
Рис. 41
Розріз і розміри робочого крісла оператора
У проектуванні робочих місць, розрахованих на робочу позу "сидячи-стоячи" або "стоячи", необхідно враховувати і відповідні антропометричні та психофізіологічні характеристики оператора. Розміщення панелей управління для роботи оператора, їхній нахил суттєво відрізняються від цих самих характеристик робочої пози "сидячи" (рис. 42).
Положення "стоячи" більше відповідає природному положенню тіла людини у просторі, хоча площа опори значно менша. В цьому положенні людина має сприятливіші умови для візуального огляду, переміщення тіла у просторі, виконання перцептивно-моторних рухів. Але тривале перебування в цій позі викликає підвищення тиску в судинах нижніх кінцівок, що призводить до розвитку різних патологічних захворювань.
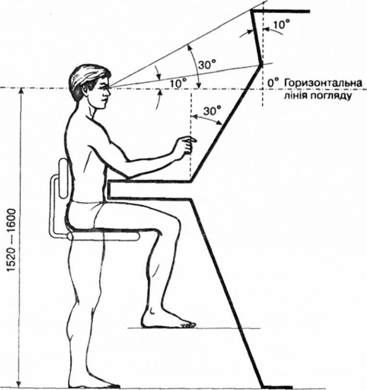
Рис. 42. розміри робочого місця у положенні "сидячи стоячи"
Ось чому в роботі у положенні "стоячи" треба уникати фіксованих поз і робити короткі перерви для відпочинку в положенні "сидячи". Різні варіанти робочих місць наведені на рис. 43.
Схожі статті
-
Інженерна психологія - Трофімов Ю. Л. - 4.5. Групова діяльність операторів
Сучасний етап розвитку механізації і автоматизації виробничих процесів характеризується тим, що управління технічними комплексами здійснюється групою...
-
Інженерна психологія - Трофімов Ю. Л. - 4.1. Основні характеристики і види діяльності операторів
4.1. Основні характеристики і види діяльності операторів Процеси приймання, переробки інформації, прийняття рішень і виконання оператором керуючих дій...
-
Інженерна психологія - Трофімов Ю. Л. - Розділ 4. Діяльність оператора в системі "людина - машина"
4.1. Основні характеристики і види діяльності операторів Процеси приймання, переробки інформації, прийняття рішень і виконання оператором керуючих дій...
-
Інженерна психологія - Трофімов Ю. Л. - 2.4. Інформація та оператор у системі управління
Для опису та оцінки діяльності людини-оператора з переробки інформації у CЛМ застосовують ідеї, поняття і математичний апарат теорії інформації....
-
Останнім часом в інженерній психології здійснюється активний пошук шляхів збору, систематизації і аналізу інженерно-психологічних даних про діяльність...
-
Інженерна психологія - Трофімов Ю. Л. - 5.2. Проектування органів управління
За допомогою органів управління оператор СЛМ вирішує завдання введення командної інформації, встановлення необхідного режиму роботи, регулювання різних...
-
Інженерна психологія - Трофімов Ю. Л. - 3.4. Керуючі дії оператора
Прийняте оператором рішення необхідно правильно і своєчасно реалізувати шляхом введення інформації в машину. Для цього використовують два "виходи"...
-
Інженерна психологія - Трофімов Ю. Л. - 1.1. Передумови виникнення
Інженерна психологія - це порівняно молода галузь психології, яка виникла на стику з технічними науками і стрімко розвивається. її поява зумовлена...
-
Інженерна психологія - Трофімов Ю. Л. - 3.3. Прийняття рішень
Процесами приймання інформації діяльність оператора не вичерпується: йому ще потрібно її проаналізувати і прийняти відповідне рішення щодо управління...
-
Інженерна психологія - Трофімов Ю. Л. - Розділ 1. ІНЖЕНЕРНА ПСИХОЛОГІЯ ЯК НАУКОВА ДИСЦИПЛІНА
Інженерна психологія - це порівняно молода галузь психології, яка виникла на стику з технічними науками і стрімко розвивається. її поява зумовлена...
-
Інженерна психологія - Трофімов Ю. Л. - Контур організаційно-функціонального регулювання
Контур організаційно-функціонального регулювання забезпечує різні види взаємозв'язків у групі, підтримуючи і задаючи тим самим спрямованість і форму...
-
Інженерна психологія - Трофімов Ю. Л. - 4.4. Функціональні стани оператора
Умови, в яких працюють оператори, можуть бути різними, тому що: по-перше, збільшується кількість компонентів довколишнього середовища, які впливають на...
-
5.1. Проектування засобів відображення інформації Особливий інтерес для інженерної психології становлять ті технічні компоненти СЛМ, з якими має справу...
-
Інженерна психологія - Трофімов Ю. Л. - Розділ 3. Психофізіологічні основи діяльності оператора
3.1. Приймання інформації Важливою складовою діяльності оператора є етап приймання інформації про об'єкт управління. Головними психічними процесами, що...
-
Інженерна психологія - Трофімов Ю. Л. - 2.1. Особливості і класифікація
2.1. Особливості і класифікація Тенденція розвитку автоматизованого та автоматичного виробництва свідчить, що віл початку виникнення інженерної...
-
Інженерна психологія - Трофімов Ю. Л. - Оперативна пам'ять
Довготривала пам'ять зберігає інформацію для подальшого її використання. При переведенні інформації із короткотривалої до довготривалої пам'яті...
-
Інженерна психологія - Трофімов Ю. Л. - Довготривала пам'ять
Довготривала пам'ять зберігає інформацію для подальшого її використання. При переведенні інформації із короткотривалої до довготривалої пам'яті...
-
Інженерна психологія - Трофімов Ю. Л. - Розділ 2. Системи "людина-машина"
2.1. Особливості і класифікація Тенденція розвитку автоматизованого та автоматичного виробництва свідчить, що віл початку виникнення інженерної...
-
На початковому етапі розвитку інженерної психології як науки в багатьох дослідженнях переважав машиноцентристський підхід, коли людина розглядалась як...
-
Інженерна психологія - Трофімов Ю. Л. - 2.3. Показники якості функціонування
Будь-яка СЯМ покликана задовольняти певні потреби людини або суспільства. Для цього вона повинна мати низку властивостей, які закладаються під час її...
-
Інженерна психологія - Трофімов Ю. Л. - 1.2. Завдання та напрямки
Інженерна психологія як наука, що виникла на стику технічних і психологічних наук, має ознаки цих двох наук. Як психологічна наука вона вивчає психічні і...
-
Інженерна психологія - Трофімов Ю. Л. - 3.1. Приймання інформації
3.1. Приймання інформації Важливою складовою діяльності оператора є етап приймання інформації про об'єкт управління. Головними психічними процесами, що...
-
Інженерна психологія - Трофімов Ю. Л. - 1.5. Інженерна психологія в системі наук
Інженерна психологія розвивається в тісному зв'язку з іншими науками, зокрема вбирає та використовує їхні досягнення, ставить перед ними нові проблеми,...
-
Інженерна психологія - Трофімов Ю. Л. - 4.2. Фактори впливу на операторську діяльність
Вивчення операторської діяльності пов'язане з виявленням і класифікацією факторів, що впливають на її ефективність. Одна з можливих класифікацій факторів...
-
Інженерна психологія - Трофімов Ю. Л. - Інженерно-психологічні вимоги до акустичних індикаторів
Хоча значна кількість інформації операторові надходить завдяки зоровим сигналам, подеколи значно доцільніше застосовувати акустичні сигнали, які можуть...
-
Інженерна психологія - Трофімов Ю. Л. - Кодування інформації
При проектуванні абстрактних ЗВІ виникає проблема оптимального кодування інформації. Термін "кодування" запозичений з теорії інформації і означає...
-
Інженерна психологія - Трофімов Ю. Л. - 5.1. Проектування засобів відображення інформації
5.1. Проектування засобів відображення інформації Особливий інтерес для інженерної психології становлять ті технічні компоненти СЛМ, з якими має справу...
-
Інженерна психологія - Трофімов Ю. Л. - Короткотривала пам'ять
За час своєї життєдіяльності людина постійно отримує інформацію, яка фіксується в корі головного мозку образами зовнішнього світу. Ці елементи досвіду,...
-
Інженерна психологія - Трофімов Ю. Л. - 3.2. Зберігання та переробка інформації
За час своєї життєдіяльності людина постійно отримує інформацію, яка фіксується в корі головного мозку образами зовнішнього світу. Ці елементи досвіду,...
-
Інженерна психологія - Трофімов Ю. Л. - Часові характеристики
Інформаційні характеристики зорового аналізатора зумовлені пропускною здатністю, що визначає кількість інформації, яку може сприйняти аналізатор за...
Інженерна психологія - Трофімов Ю. Л. - 5.3. Організація робочого місця оператора